autowisp.image_calibration.master_flat_maker module
Class Inheritance Diagram
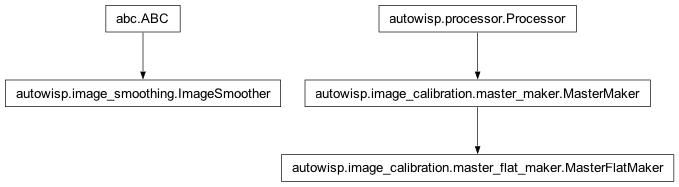
Define classes for creating master flat frames.
- class autowisp.image_calibration.master_flat_maker.MasterFlatMaker(*, stamp_statistics_config=None, stamp_select_config=None, large_scale_smoother=None, cloud_check_smoother=None, master_stack_config=None)[source]
Bases:
MasterMaker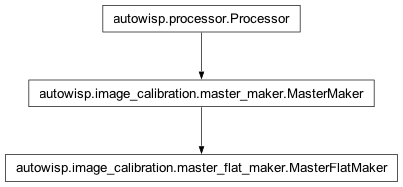
Specialize MasterMaker for making master flat frames.
- stamp_statistics_config
Dictionary configuring how stamps statistics for stamp-based selection are extracted from the frames.
- stamp_select_config
Dictionary configuring how stamp-based selection is performed. See keyword only arguments of
configure_stamp_selection()for details.
- large_scale_smoother
A
autowisp.image_smoothing.ImageSmootherinstance applied to the ratio of a frame to the reference large scale structure before applying it to the frame.
- cloud_check_smoother
autowisp.image_smoothing.ImageSmootherinstance used for cloud detection performed on the full flat frames after smoothing to the master large scale structure.
- master_stack_config
Dictionary configuring how to stack the individual frames into a master.
- _master_large_scale
The large scale structure imposed on all master flats. Dictionary with keys
values,stdev,maskandheader. If empty dictionary, nothing is imposed.
Examples
>>> import scipy.ndimage.filters >>> from autowisp.image_smoothing import\ >>> PolynomialImageSmoother,\ >>> SplineImageSmoother,\ >>> ChainSmoother,\ >>> WrapFilterAsSmoother >>> >>> #Stamp statistics configuration: >>> # * stamps span half the frame along each dimension >>> # * stamps are detrended by a bi-quadratic polynomial with at most >>> # one rejection iteration, discarding more than 3-sigma outliers. >>> # * for each stamp a iterative rejection mean and variance are >>> # calculated with up to 3 iterations rejecting three or more >>> # sigma outliers. >>> stamp_statistics_config = dict( >>> fraction=0.5, >>> smoother=PolynomialImageSmoother(num_x_terms=3, >>> num_y_terms=3, >>> outlier_threshold=3.0, >>> max_iterations=3), >>> average='mean', >>> outlier_threshold=3.0, >>> max_iter=3 >>> ) >>> >>> #Stamp statistics based selection configuration: >>> # * Stamps with more than 0.1% of their pixels saturated are >>> # discarded >>> # * if variance vs mean quadratic fit has residual of more than 5k >>> # ADU^2, the entire night is considered cloudy. >>> # * individual frames with stamp mean and variance deviating more >>> # than 2*(fit_residual) are discarded as cloudy. >>> # * high master flat will be generated from frames with stamp mean >>> # > 25 kADU, and low master flat from frames with stamp mean < 15 >>> # kADU (intermediate frames are discarded). >>> stamp_select_config = dict(max_saturated_fraction=1e-4, >>> var_mean_fit_threshold=2.0, >>> var_mean_fit_iterations=2, >>> cloudy_night_threshold=5e3, >>> cloudy_frame_threshold=2.0, >>> min_high_mean=2.5e4, >>> max_low_mean=1.5e4) >>> >>> #Large scale structure smoothing configuration. For each frame, the >>> #large scale struture is corrected by taking the ratio of the frame >>> #to the reference (median of all input frames), smoothing this ratio >>> #and then dividing by it. The following defines how the smoothing is >>> #performed: >>> # * shrink by a factor of 4 in each direction (16 pixels gets >>> # averaged to one). >>> # * Performa a box-filtering with a half-size of 6-pixels using >>> # median averaging >>> # * Perform a bi-cubic spline interpolation smoothing of the >>> # box-filtered image. >>> # * Discard more than 5-sigma outliers if any and re-smooth (no >>> # further iterations allowed) >>> # * Re-interpolate the image back to its original size, using >>> # bicubic interpolation (see zoom_image()). >>> # * The resulting image is scaled to have a mean of 1 (no >>> # configuration for that). >>> large_scale_smoother = ChainSmoother( >>> WrapFilterAsSmoother(scipy.ndimage.filters.median_filter, >>> size=12), >>> SplineImageSmoother(num_x_nodes=3, >>> num_y_nodes=3, >>> outlier_threshold=5.0, >>> max_iter=1), >>> bin_factor=4, >>> zoom_interp_order=3 >>> ) >>> >>> #Configuration for smoothnig when checking for clouds. >>> #After smoothing to the master large scale structure: >>> # * extract a central stamp is extracted from each flat covering >>> # 3/4 of the frame along each dimension >>> # * shrink the fractional deviation of that stamp from the master >>> # by a factor of 4 in each dimension >>> # * smooth by median box-filtering with half size of 4 shrunk >>> # pixels >>> # * zoom the frame back out by a factor of 4 in each dimension >>> # (same factor as shrinking, no separater config), using >>> # bi-quadratic interpolation. >>> cloud_check_smoother = WrapFilterAsSmoother( >>> scipy.ndimage.filters.median_filter, >>> size=8, >>> bin_factor=4, >>> zoom_interp_order=3 >>> ) >>> >>> #When stacking masters require: >>> # * At least 10 input frames for a high intensity master and at >>> # least 5 for a low intensity one. >>> # * When creating the stack used to match large-scale structure, >>> # use median averaging with outlier rejection of more than >>> # 4-sigma outliers with at most one reject/re-fit iteration. >>> # * When creating the final master use median averaging with >>> # outlier rejection of more than 2-sigma outliers in the positive >>> # and more than 3-sigma in the negative direction with at most 2 >>> # reject/re-fit iterations. Create the master compressed and >>> # raise an exception if a file with that name already exists. >>> master_stack_config = dict( >>> min_pointing_separation=150.0, >>> large_scale_deviation_threshold=0.05, >>> min_high_combine=10, >>> min_low_combine=5, >>> large_scale_stack_options=dict( >>> outlier_threshold=4, >>> average_func=numpy.nanmedian, >>> min_valid_values=3, >>> max_iter=1, >>> exclude_mask=MasterMaker.default_exclude_mask >>> ), >>> master_stack_options=dict( >>> outlier_threshold=(2, -3), >>> average_func=numpy.nanmedian, >>> min_valid_values=3, >>> max_iter=2, >>> exclude_mask=MasterMaker.default_exclude_mask, >>> compress=True, >>> allow_overwrite=False >>> ) >>> ) >>> >>> #Create an object for stacking calibrated flat frames to master >>> #flats. In addition to the stamp-based rejections: >>> # * reject flats that point within 40 arcsec of each other on the >>> # sky. >>> # * Require at least 10 frames to be combined into a high master >>> # and at least 5 for a low master. >>> # * if the smoothed cloud-check image contains pixels with absolute >>> # value > 5% the frame is discarded as cloudy. >>> make_master_flat = MasterFlatMaker( >>> stamp_statistics_config=stamp_statistics_config, >>> stamp_select_config=stamp_select_config, >>> large_scale_smoother=large_scale_smoother, >>> cloud_check_smoother=cloud_check_smoother, >>> master_stack_config=master_stack_config >>> ) >>> >>> #Create master flat(s) from the given raw flat frames. Note that >>> #zero, one or two master flat frames can be created, depending on >>> #the input images. Assume that the raw flat frames have names like >>> #10-<fnum>_2.fits.fz, with fnum ranging from 1 to 30 inclusive. >>> make_master_flat( >>> ['10-%d_2.fits.fz' % fnum for fnum in range(1, 31)], >>> high_master_fname='high_master_flat.fits.fz', >>> low_master_fname='low_master_flat.fits.fz' >>> )
- __call__(frame_list, high_master_fname, low_master_fname, *, compress=True, allow_overwrite=False, stamp_statistics_config=None, stamp_select_config=None, master_stack_config=None, custom_header=None)[source]
Attempt to create high & low master flat from the given frames.
- Parameters:
frame_list – A list of the frames to create the masters from (FITS filenames).
high_master_fname – The filename to save the generated high intensity master flat if one is successfully created.
low_master_fname – The filename to save the generated low intensity master flat if one is successfully created.
compress – Should the final result be compressed?
allow_overwrite – See same name argument to
autowisp.image_calibration.fits_util.create_result().stamp_statistics_config (dict) – Overwrite the configuration for extracting stamp statistics for this set of frames only.
stamp_select_config (dict) – Overwrite the stamp selection configuration for this set of frames only.
master_stack_config (dict) – Overwrite the configuration for how to stack frames to a master for this set of frames only.
custom_header – See same name argument to
autowisp.image_calibration.master_maker.MasterMaker.__call__().
- Returns:
A dictionary splitting the input list of frames into
- high:
All entries from
frame_listwhich were deemed suitable for inclusion in a master high flat.- low:
All entries from
frame_listwhich were deemed suitable for inclusion in a master low flat.- medium:
All entries from
frame_listwhich were of intermediate intensity and thus not included in any master, but for which no issues were detected.- colocated:
All entries from
frame_listwhich were excluded because they were not sufficiently isolated from their closest neighbor to guarantee that stars do not overlap.- cloudy:
All entries from
frame_listwhich were flagged as cloudy either based on their stamps or on the final full-frame cloud check.
- Return type:
- __init__(*, stamp_statistics_config=None, stamp_select_config=None, large_scale_smoother=None, cloud_check_smoother=None, master_stack_config=None)[source]
Create object for creating master flats out of calibrated flat frames.
- Parameters:
stamp_statistics_config – A dictionary mith arguments to pass to
configure_stamp_statistics().stamp_select_cofig – A dictionary with arguments to pass to
configure_stamp_selection().large_scale_smoother – An ImageSmoother instance used when matching large scale structure of individual flats to master.
cloud_check_smoother – An ImageSmoother instance used when checkng the full frames for clouds (after stamps are checked).
master_stack_config – Configuration of how to stack frames to a master after matching their large scale structure. See example in class doc-string for details.
- Returns:
None
- _classify_from_stamps(frame_list, stamp_statistics_config, stamp_select_config)[source]
Classify frames by intensity: (high/low/ntermediate), or flag as cloudy.
- Parameters:
frame_list – The list of frames to create masters from.
- Returns:
- filename list:
The list of high intensity non-cloudy frames.
- filename list:
The list of low intensity non-cloudy frames.
- filename list:
The list of medium intensity non-cloudy frames.
- filename list:
The list of frames suspected of containing clouds in their central stamps.
- Return type:
(tuple)
- _find_colocated(frame_list)[source]
Split the list of frames into well isolated ones and co-located ones.
- Parameters:
frame_list – A list of the frames to create the masters from (FITS filenames).
- Returns:
- filename list:
The ist of frames sufficiently far in pointing from all other frames.
- filename list:
The list of frames which have at least one other frame too close in pointing to them.
- Return type:
(tuple)
- _get_stamp_statistics(frame_list, **stamp_statistics_config)[source]
Get relevant information from the stamp of a single input flat frame.
- Parameters:
frame_list – The list of frames for which to extract stamp statistics.
- Returns:
An array with fields called
mean,varianceandnum_averagedwith the obvious meanings.- Return type:
numpy field array
- configure_stamp_selection(*, max_saturated_fraction=None, var_mean_fit_threshold=None, var_mean_fit_iterations=None, cloudy_night_threshold=None, cloudy_frame_threshold=None, min_high_mean=None, max_low_mean=None)[source]
Configure stamp-based frame selection and high/low split.
- Parameters:
max_saturated_fraction – The maximum fraction of stamp pixels allowed to be saturated before discarding the frame.
cloudy_night_threshold – The maximum residual of the variance vs mean quadratic fit before a night is declared cloudy. If None, this check is disabled.
cloudy_frame_threshold – The maximum deviation in units of the RMS residual of the fit an individual frame’s variance vs mean from the var(mean) quadratic fit before the frame is declared cloudy.
min_high_mean – The minimum mean of the stamp pixels in order to consider the frame high intensity.
max_low_mean – The maximum mean of the stamp pixels in order to consider the frame low intensity. Must not overlap with min_high_mean.
- Returns:
None
- configure_stamp_statistics(*, fraction=None, smoother=None, outlier_threshold=None, max_iter=None, average=None)[source]
Configure extraction of stamp satistics for rejection & high/low split.
Any arguments left as None are not updated.
- Parameters:
fraction – The fraction of the frame size that is included in the stamp along each dimension (i.e. fraction=0.5 means 1/4 of all frame pixels will be incruded in the stamp).
smoother – An ImageSmoother instance used used for de-trending the stamps before extracting statistics
outlier_threshold – The threshold in units of RMS deviation from the average above which pixels are considered outliers from the de-trending function and discarded from its fit.
max_iter – The maximum number of fit/reject iterations to perform before declaring the de-trending function final.
average – How to compute the average. Should be either
'mean'or'median'.
- Returns:
None
- prepare_for_stacking(image)[source]
Match image large scale to self._master_large_scale if not empty.
- Parameters:
image – The image to transform large scale structure of.
- Returns:
If
_master_large_scaleis an empty dictionary, this is justimage. Otherwise,imageis transformed to have the same large scale structure as_master_large_scale, while the small scale structure is preserved.imageis also checked for clouds, and discarded if cloudy.- Return type:
2-D array